
G1 (29DoF) + Dex3-1 |

H1_2 (Arm 7DoF) |
- Vuerライブラリをアップグレードし、より多くのXRデバイスモードに対応しました。これに伴い、プロジェクト名を
avp_teleoperateからxr_teleoperateに変更しました。従来の Apple Vision Pro に加え、Meta Quest 3(コントローラー対応) や PICO 4 Ultra Enterprise(コントローラー対応) にも対応しています。 - 一部の機能をモジュール化し、Gitサブモジュール(
git submodule)を用いて管理・読み込みを行うことで、コード構造の明確化と保守性を向上させました。 - ヘッドレスモード、運用モード、シミュレーションモードを新たに追加し、起動パラメータの設定を最適化しました(第2.2節参照)。シミュレーションモードにより、環境構成の検証やハードウェア故障の切り分けが容易になります。
- デフォルトの手指マッピングアルゴリズムを Vector から DexPilot に変更し、指先のつまみ動作の精度と操作性を向上させました。
- その他、さまざまな最適化を実施しました。
このリポジトリでは、XR(拡張現実)デバイス(Apple Vision Pro、PICO 4 Ultra Enterprise、Meta Quest 3など)を使用してUnitreeヒューマノイドロボットの遠隔操作を実装しています。
必要なデバイスと配線図は以下の通りです。
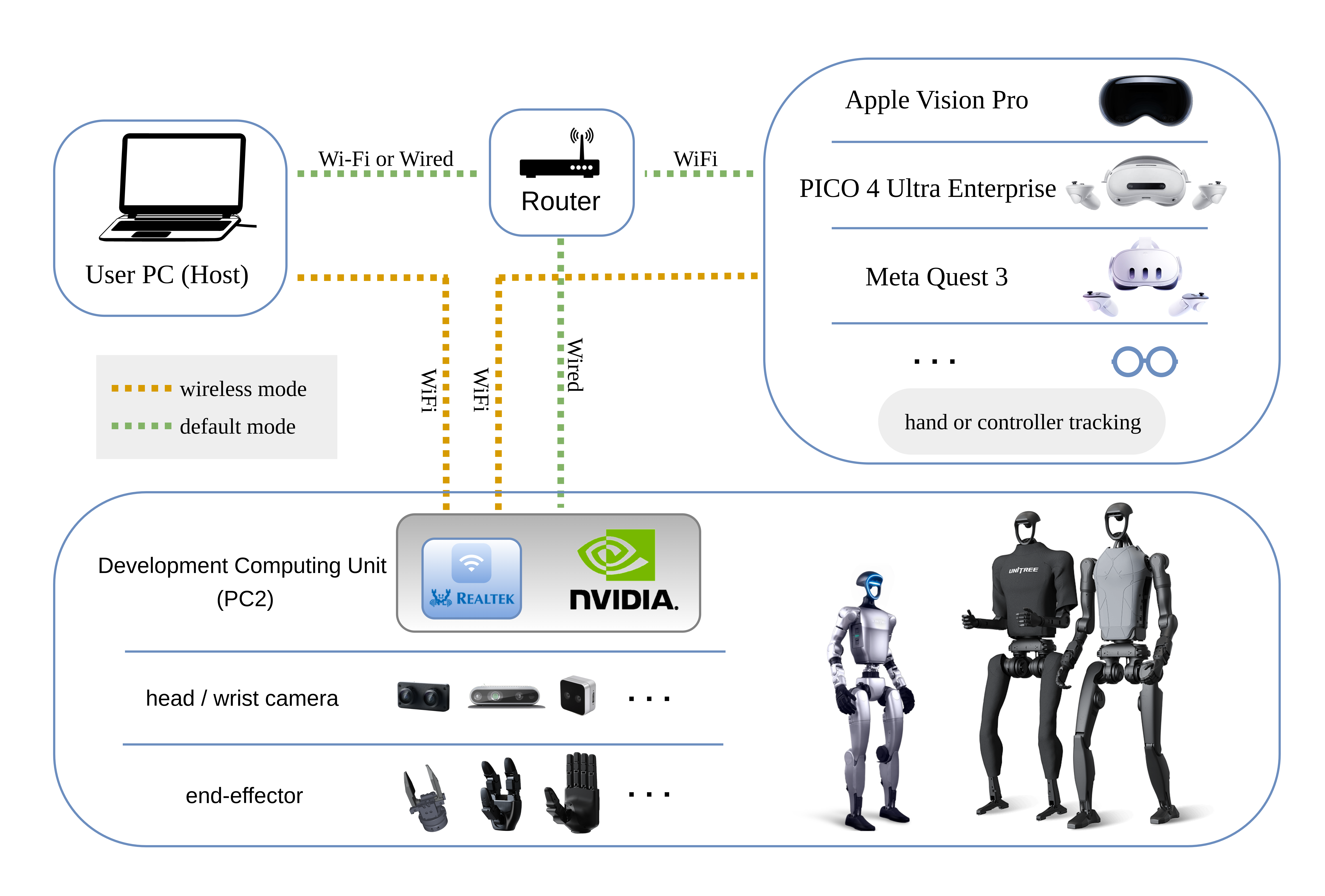
このリポジトリで現在サポートされているデバイス:
| 🤖 ロボット | ⚪ ステータス |
|---|---|
| G1 (29 DoF) | ✅ 実装済み |
| G1 (23 DoF) | ✅ 実装済み |
| H1 (4自由度アーム) | ✅ 実装済み |
| H1_2 (7自由度アーム) | ✅ 実装済み |
| Dex1‑1グリッパー | ✅ 実装済み |
| Dex3‑1多指ハンド | ✅ 実装済み |
| Inspire多指ハンド | ✅ 実装済み |
| ··· | ··· |
Ubuntu 20.04と22.04でテスト済みです。他のOSでは設定が異なる場合があります。本ドキュメントでは、主に通常モードについて説明します。
詳細は公式ドキュメントとOpenTeleVisionを参照してください。
# Create a conda environment
(base) unitree@Host:~$ conda create -n tv python=3.10 pinocchio=3.1.0 numpy=1.26.4 -c conda-forge
(base) unitree@Host:~$ conda activate tv
# Clone this repo
(tv) unitree@Host:~$ git clone https://github.com/unitreerobotics/xr_teleoperate.git
(tv) unitree@Host:~$ cd xr_teleoperate
# Shallow clone submodule
(tv) unitree@Host:~/xr_teleoperate$ git submodule update --init --depth 1
# Install televuer submodule
(tv) unitree@Host:~/xr_teleoperate$ cd teleop/televuer
(tv) unitree@Host:~/xr_teleoperate/teleop/televuer$ pip install -e .
# Generate the certificate files required for televuer submodule
(tv) unitree@Host:~/xr_teleoperate/teleop/televuer$ openssl req -x509 -nodes -days 365 -newkey rsa:2048 -keyout key.pem -out cert.pem
# Install dex-retargeting submodule
(tv) unitree@Host:~/xr_teleoperate/teleop/televuer$ cd ../robot_control/dex-retargeting/
(tv) unitree@Host:~/xr_teleoperate/teleop/robot_control/dex-retargeting$ pip install -e .
# Install additional dependencies required by this repo
(tv) unitree@Host:~/xr_teleoperate/teleop/robot_control/dex-retargeting$ cd ../../../
(tv) unitree@Host:~/xr_teleoperate$ pip install -r requirements.txt# ロボット通信用ライブラリインストール
(tv) unitree@Host:~$ git clone https://github.com/unitreerobotics/unitree_sdk2_python.git
(tv) unitree@Host:~$ cd unitree_sdk2_python
(tv) unitree@Host:~/unitree_sdk2_python$ pip install -e .注1: 元のh1_2ブランチのunitree_dds_wrapperは暫定版でした。現在は公式Python制御ライブラリunitree_sdk2_pythonに移行済みです。
注2: コマンド前の識別子は「どのデバイスでどのディレクトリで実行するか」を示しています。
Ubuntuの
~/.bashrcデフォルト設定:PS1='${debian_chroot:+($debian_chroot)}\u@\h:\w\$ '例:
(tv) unitree@Host:~$ pip install meshcat
(tv)conda環境tvを表示unitree@Host:~ユーザーunitreeがHostデバイスにログイン、カレントディレクトリは$HOME$Bashシェル(非rootユーザー)pip install meshcatはHostで実行するコマンド
まずunitree_sim_isaaclabをインストールし、READMEに従って設定します。
G1(29 DoF)とDex3ハンド構成でシミュレーションを起動:
(base) unitree@Host:~$ conda activate unitree_sim_env
(unitree_sim_env) unitree@Host:~$ cd ~/unitree_sim_isaaclab
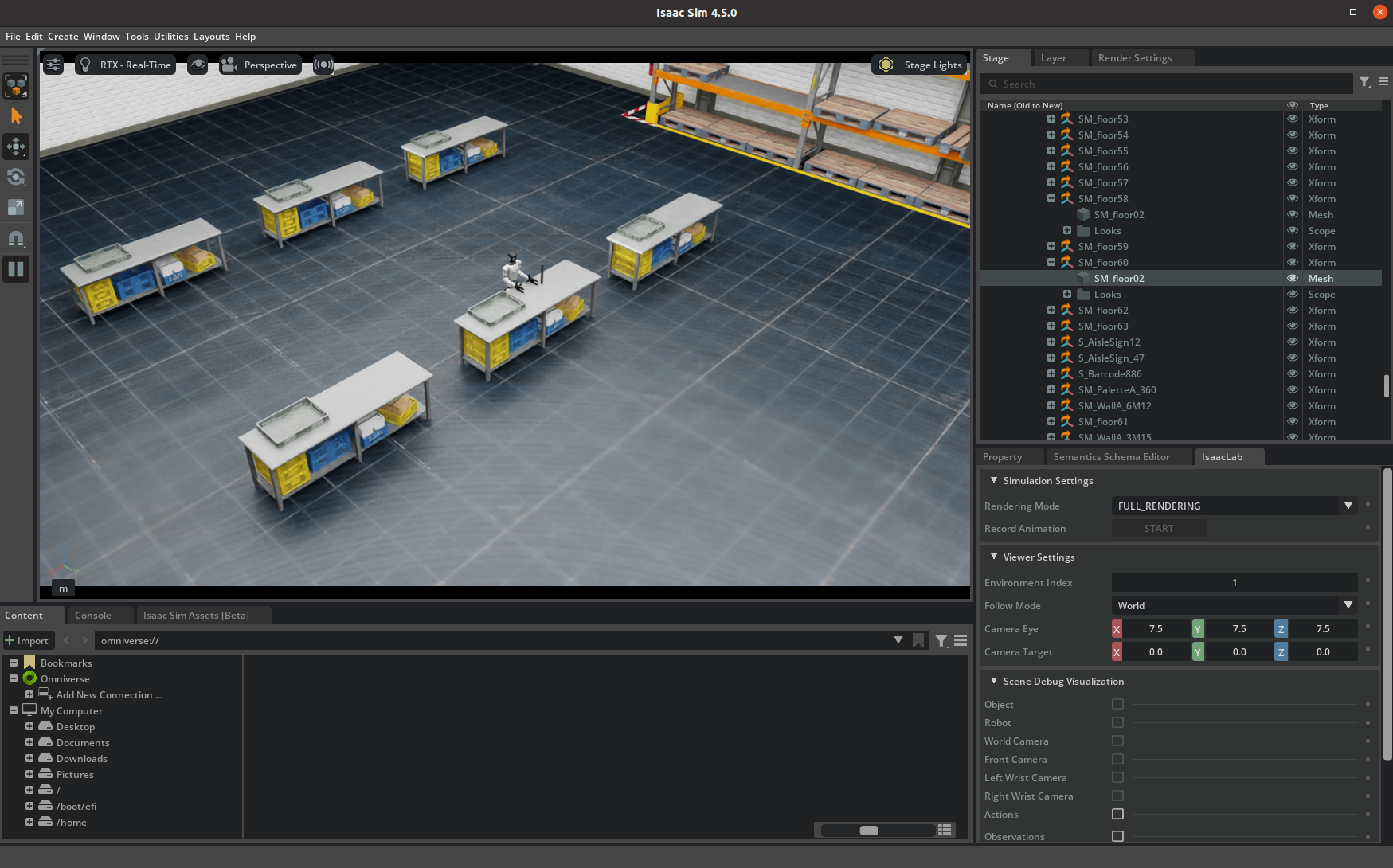
(unitree_sim_env) unitree@Host:~/unitree_sim_isaaclab$ python sim_main.py --device cpu --enable_cameras --task Isaac-PickPlace-Cylinder-G129-Dex3-Joint --enable_dex3_dds --robot_type g129シミュレーション起動後、ウィンドウをクリックして有効化。ターミナルにcontroller started, start main loop...と表示されます。
シミュレーションGUI:
物理ロボットとシミュレーションの両方でXR制御をサポート。コマンドライン引数でモード選択:
- 基本制御パラメータ
| ⚙️ パラメータ | 📜 説明 | 🔘 オプション | 📌 デフォルト |
|---|---|---|---|
--xr-mode |
XR入力モード選択 | hand (ハンドトラッキング) controller (コントローラートラッキング) |
hand |
--arm |
ロボットアームタイプ選択 (0. 📖 参照) | G1_29 G1_23 H1_2 H1 |
G1_29 |
--ee |
エンドエフェクタ選択 (0. 📖 参照) | dex1 dex3 inspire1 |
none |
- モードフラグ
| ⚙️ フラグ | 📜 説明 |
|---|---|
--record |
データ記録有効化: r押下で開始後、sでエピソード記録開始/停止。繰り返し可能 |
--motion |
モーション制御有効化: 遠隔操作中に独立したロボット制御を許可。 ハンドモードではR3リモコンで歩行、コントローラーモードではジョイスティックで歩行 |
--headless |
GUIなしで実行(ヘッドレスPC2展開用) |
--sim |
シミュレーションモード有効化 |
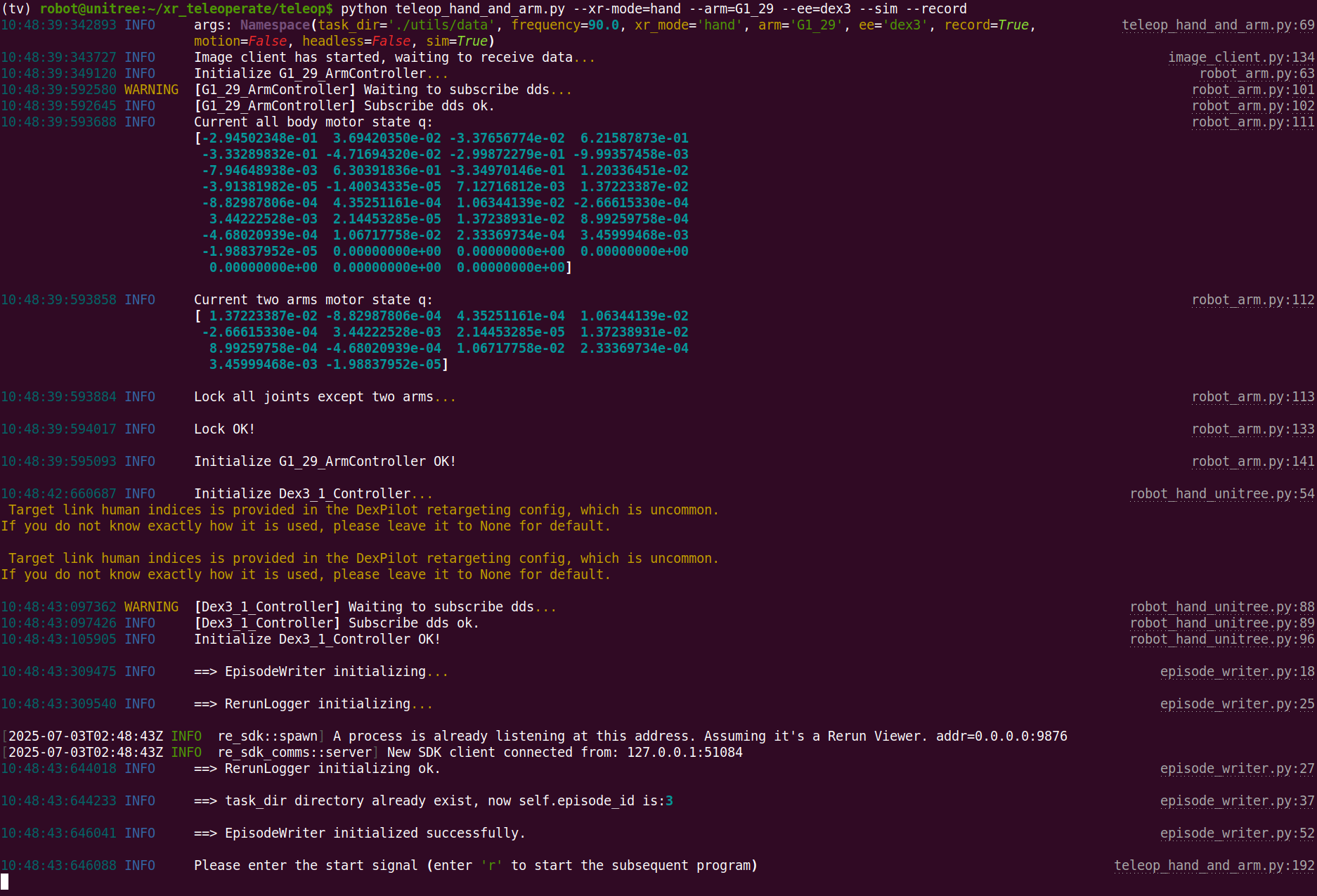
G1(29 DoF) + Dex3でハンドトラッキング、シミュレーション、記録モードで起動:
(tv) unitree@Host:~$ cd ~/xr_teleoperate/teleop/
(tv) unitree@Host:~/xr_teleoperate/teleop/$ python teleop_hand_and_arm.py --xr-mode=hand --arm=G1_29 --ee=dex3 --sim --record
# 簡略化(デフォルト適用):
(tv) unitree@Host:~/xr_teleoperate/teleop/$ python teleop_hand_and_arm.py --ee=dex3 --sim --recordプログラム起動後、ターミナル表示:
次の手順:
-
XRヘッドセット(Apple Vision Pro、PICO4など)を装着
-
対応するWi-Fiに接続
-
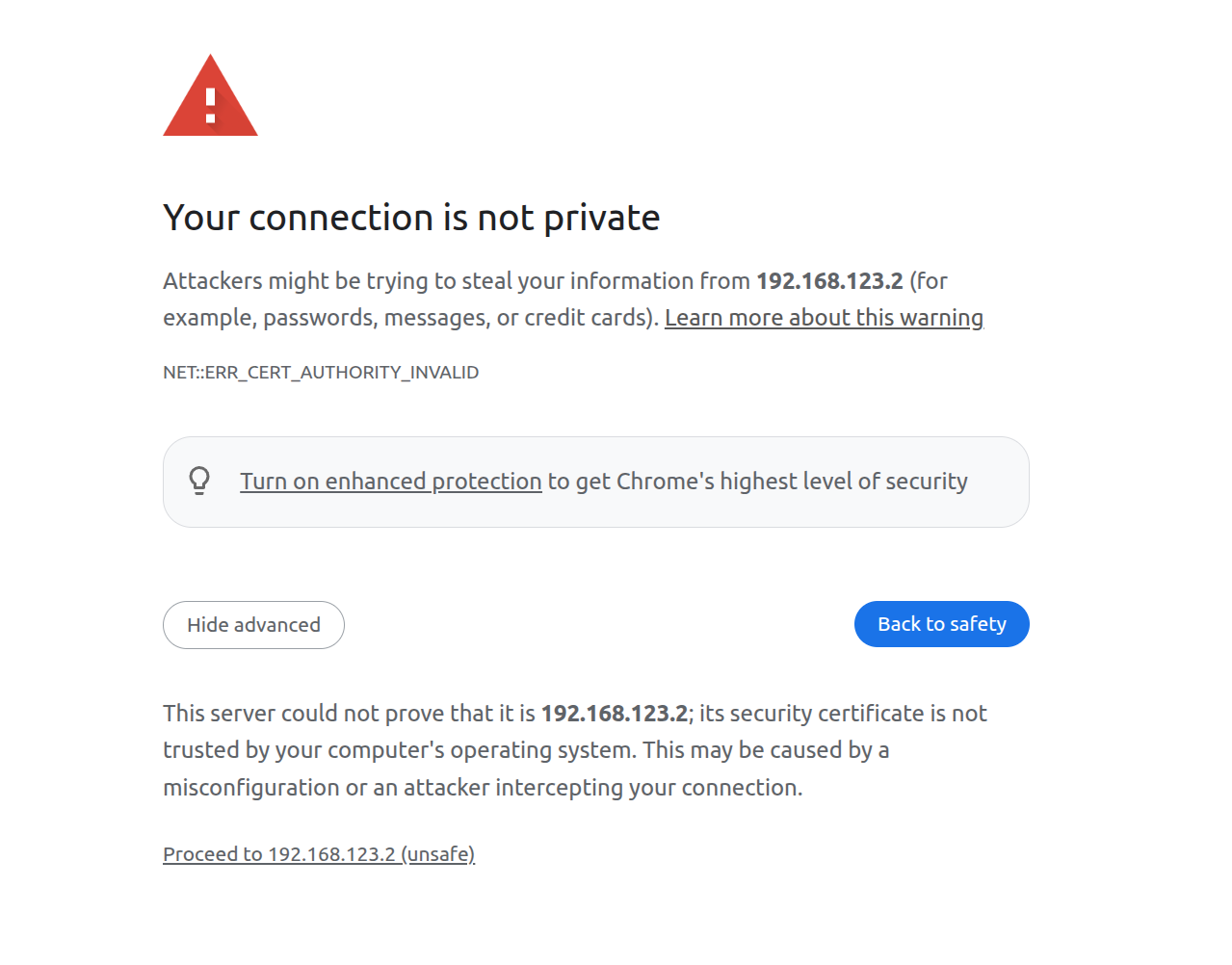
ブラウザ(SafariやPICO Browserなど)で以下にアクセス:
https://192.168.123.2:8012?ws=wss://192.168.123.2:8012注1: このIPはHostのIPと一致させる必要あり(
ifconfigで確認)。 注2: 警告ページが表示される場合があります。[詳細設定]→[IPにアクセス(安全ではない)]を選択。 -
Vuerウェブで[Virtual Reality]をクリック。すべてのプロンプトを許可してVRセッションを開始。
-
ヘッドセットにロボットの一人称視点が表示されます。ターミナルに接続情報が表示:
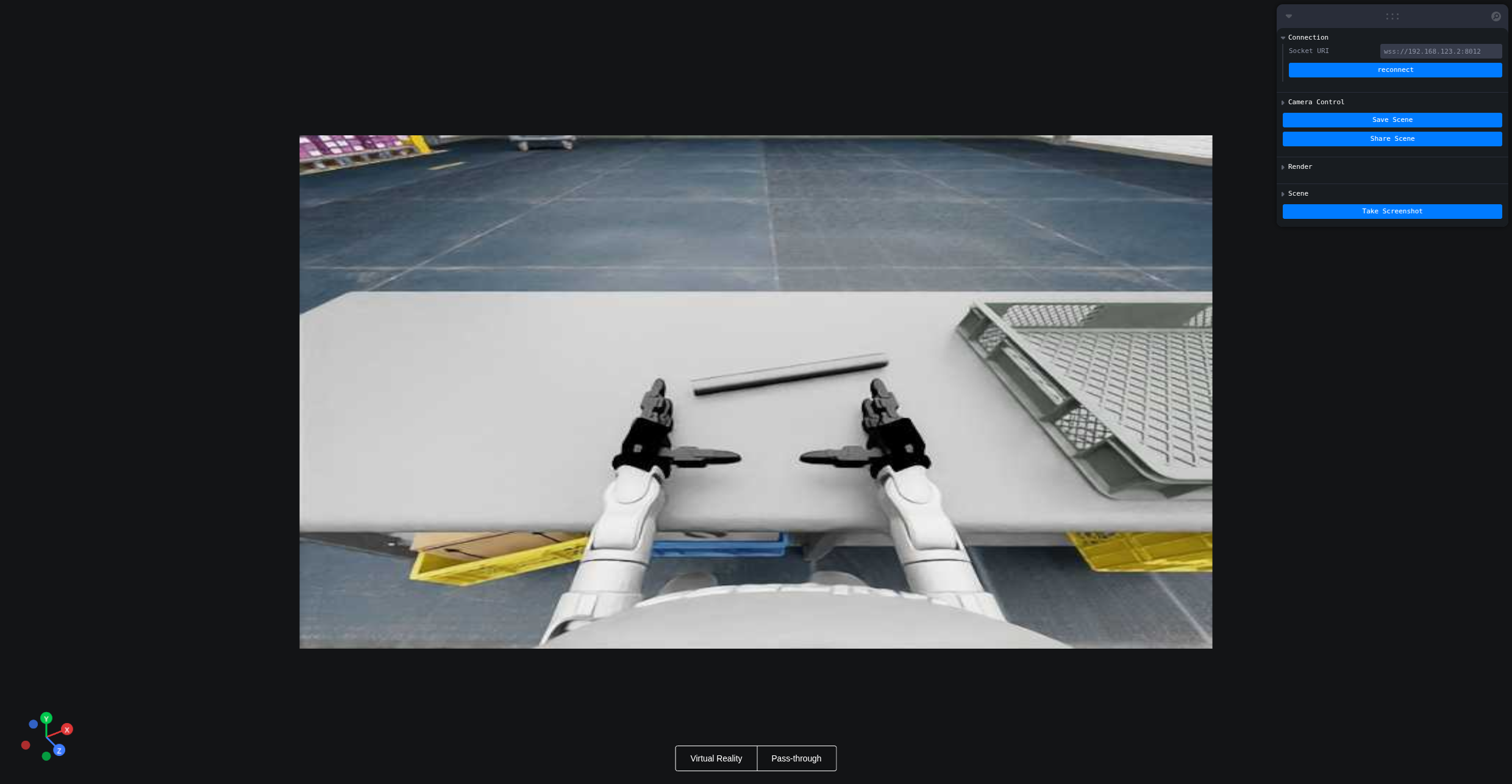
websocket is connected. id:dbb8537d-a58c-4c57-b49d-cbb91bd25b90
default socket worker is up, adding clientEvents
Uplink task running. id:dbb8537d-a58c-4c57-b49d-cbb91bd25b90- 急な動きを防ぐため、ロボットの初期姿勢に腕を合わせる:
-
ターミナルでrを押して遠隔操作を開始。ロボットアームと多指ハンドを制御できます。
-
遠隔操作中、sで記録開始、再度sで停止・保存。繰り返し可能。
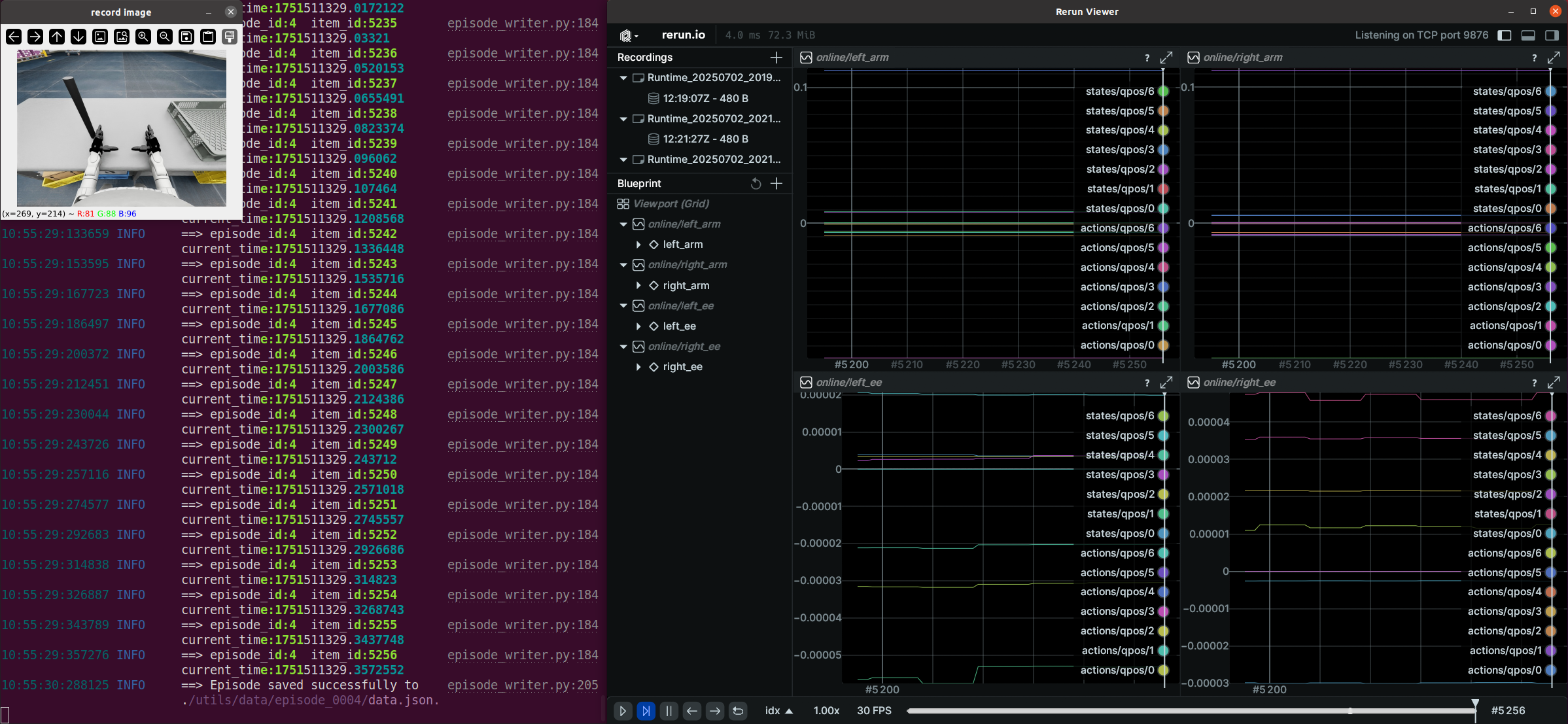
注1: 記録データはデフォルトで
xr_teleoperate/teleop/utils/dataに保存。unitree_IL_lerobotで使用方法を確認。 注2: データ記録時はディスク容量に注意してください。
ターミナル(または「record image」ウィンドウ)でqを押して終了。
物理環境展開の手順はシミュレーションと似ていますが、以下の点が異なります:
xr_teleoperate/teleop/image_serverディレクトリのimage_server.pyをUnitreeロボット(G1/H1/H1_2など)の開発用計算ユニットPC2にコピーし。
# 補足: scpコマンドでimage_server.pyをPC2に転送後、sshでPC2にリモートログインして実行可能
# 開発用計算ユニットPC2のIPが192.168.123.164の場合の転送手順:
# SSHでPC2にログインし、画像サーバー用フォルダ作成
(tv) unitree@Host:~$ ssh unitree@192.168.123.164 "mkdir -p ~/image_server"
# ローカルのimage_server.pyをPC2の~/image_serverディレクトリにコピー
(tv) unitree@Host:~$ scp ~/xr_teleoperate/teleop/image_server/image_server.py unitree@192.168.123.164:~/image_server/PC2で以下を実行:
# 補足: 現在この画像転送プログラムは、OpenCVとRealsense SDKの2つの画像読み取り方法をサポート。`image_server.py`内の`ImageServer`クラスのコメントを参照し、カメラハードウェアに合わせて画像転送サービスを設定。
# UnitreeロボットPC2のターミナルで実行
unitree@PC2:~/image_server$ python image_server.py
# ターミナルに以下の出力が表示:
# {'fps': 30, 'head_camera_type': 'opencv', 'head_camera_image_shape': [480, 1280], 'head_camera_id_numbers': [0]}
# [Image Server] Head camera 0 resolution: 480.0 x 1280.0
# [Image Server] Image server has started, waiting for client connections...画像サービス起動後、Hostターミナルでimage_client.pyを使用して通信テスト可能:
(tv) unitree@Host:~/xr_teleoperate/teleop/image_server$ python image_client.pyNote 1: Skip this if your config does not use the Inspire hand. Note 2: For the G1 robot with Inspire DFX hand, see issue #46. Note 3: For Inspire FTP hand, see issue #48.
多指ハンド開発を参照して関連環境を設定し、制御プログラムをコンパイル。このURLから多指ハンド制御インターフェースプログラムをダウンロードし、UnitreeロボットのPC2にコピー。
UnitreeロボットのPC2で以下を実行:
unitree@PC2:~$ sudo apt install libboost-all-dev libspdlog-dev
# プロジェクトビルド
unitree@PC2:~$ cd h1_inspire_service & mkdir build & cd build
unitree@PC2:~/h1_inspire_service/build$ cmake .. -DCMAKE_BUILD_TYPE=Release
unitree@PC2:~/h1_inspire_service/build$ make
# ターミナル1. h1 inspireハンドサービス実行
unitree@PC2:~/h1_inspire_service/build$ sudo ./inspire_hand -s /dev/ttyUSB0
# ターミナル2. サンプル実行
unitree@PC2:~/h1_inspire_service/build$ ./h1_hand_example両手が連続的に開閉すれば成功。成功後、ターミナル2の./h1_hand_exampleプログラムを終了。
- すべての人はロボットから安全な距離を保ち、潜在的な危険を防止してください!
- このプログラムを実行する前に、少なくとも一度は公式ドキュメントをお読みください。
--motionなしの場合、ロボットがデバッグモード(L2+R2)に入り、モーション制御プログラムが停止していることを確認してください。これにより潜在的なコマンド競合問題を回避できます。- モーションモード(
--motionあり)を使用する場合、ロボットが制御モード(R3リモコン経由)にあることを確認。- モーションモード時:
- 右コントローラーA = 遠隔操作終了
- 両ジョイスティック押下 = ソフト非常停止(ダンピングモードに切替)
- 左ジョイスティック = 移動方向;
- 右ジョイスティック = 旋回;
- 最大速度はコード内で制限。
シミュレーションと同じですが、上記の安全警告に従ってください。
ロボット損傷を防ぐため、終了前にロボットの腕を初期姿勢に近づけることを推奨。
- デバッグモード: 終了キー押下後、両腕は5秒以内にロボットの初期姿勢に戻り、制御終了。
- モーションモード: 終了キー押下後、両腕は5秒以内にロボットのモーション制御姿勢に戻り、制御終了。
シミュレーションと同じですが、上記の安全警告に従ってください。
xr_teleoperate/
│
├── assets [ロボットURDF関連ファイル格納]
│
├── hardware [3Dプリントハードウェアモジュール]
│
├── teleop
│ ├── image_server
│ │ ├── image_client.py [ロボット画像サーバーから画像データを受信]
│ │ ├── image_server.py [カメラから画像をキャプチャしネットワーク送信(ロボットの開発用計算ユニットPC2で実行)]
│ │
│ ├── televuer
│ │ ├── src/televuer
│ │ ├── television.py [XRデバイスの頭部、手首、手・コントローラーのデータを取得]
│ │ ├── tv_wrapper.py [取得データの後処理]
│ │ ├── test
│ │ ├── _test_television.py [television.pyのテスト]
│ │ ├── _test_tv_wrapper.py [tv_wrapper.pyのテスト]
│ │
│ ├── robot_control
│ │ ├── src/dex-retargeting [多指ハンドリターゲティングアルゴリズムライブラリ]
│ │ ├── robot_arm_ik.py [アームの逆運動学]
│ │ ├── robot_arm.py [両腕関節を制御し他をロック]
│ │ ├── hand_retargeting.py [多指ハンドリターゲティングアルゴリズムラッパー]
│ │ ├── robot_hand_inspire.py [inspireハンド関節を制御]
│ │ ├── robot_hand_unitree.py [unitreeハンド関節を制御]
│ │
│ ├── utils
│ │ ├── episode_writer.py [模倣学習用データ記録]
│ │ ├── weighted_moving_filter.py [関節データのフィルタリング]
│ │ ├── rerun_visualizer.py [記録中のデータ可視化]
│ │
│ └── teleop_hand_and_arm.py [遠隔操作起動実行コード]
注: 太字のアイテムは遠隔操作タスクに必須の設備、その他はデータセット記録用のオプション設備。
| アイテム | シミュレーション | 実機 | ||
|---|---|---|---|---|
| 頭部 | | | | |
| 手首 | | | | |






注: 手首リングマウントは、ロボットの手首の継ぎ目に合わせて取り付け(画像の赤丸部分)。
このコードは以下のオープンソースコードを基にしています。各LICENSEはURLで確認してください:
- https://github.com/OpenTeleVision/TeleVision
- https://github.com/dexsuite/dex-retargeting
- https://github.com/vuer-ai/vuer
- https://github.com/stack-of-tasks/pinocchio
- https://github.com/casadi/casadi
- https://github.com/meshcat-dev/meshcat-python
- https://github.com/zeromq/pyzmq
- https://github.com/Dingry/BunnyVisionPro
- https://github.com/unitreerobotics/unitree_sdk2_python