



本项目基于 Qt5 开发,使用 CMake 构建,可以实现一套代码同时在 ROS1/ROS2 系统中使用。软件在编译时会自动识别环境变量中的 ROS1/ROS2 环境并进行构建,实现 ROS 通信与界面隔离。
所有功能均为自行绘制实现,因此可以轻松运行在性能较低的边缘设备上。项目已接入 CI,保证多 ROS 版本/系统版本的可用性。
- ROS1 通信支持 - 基础功能已实现,持续优化中
- ROS2 通信支持 - 稳定及长期支持维护
- ROSBridge 通信支持 - 支持 WebSocket 连接,支持断线重连
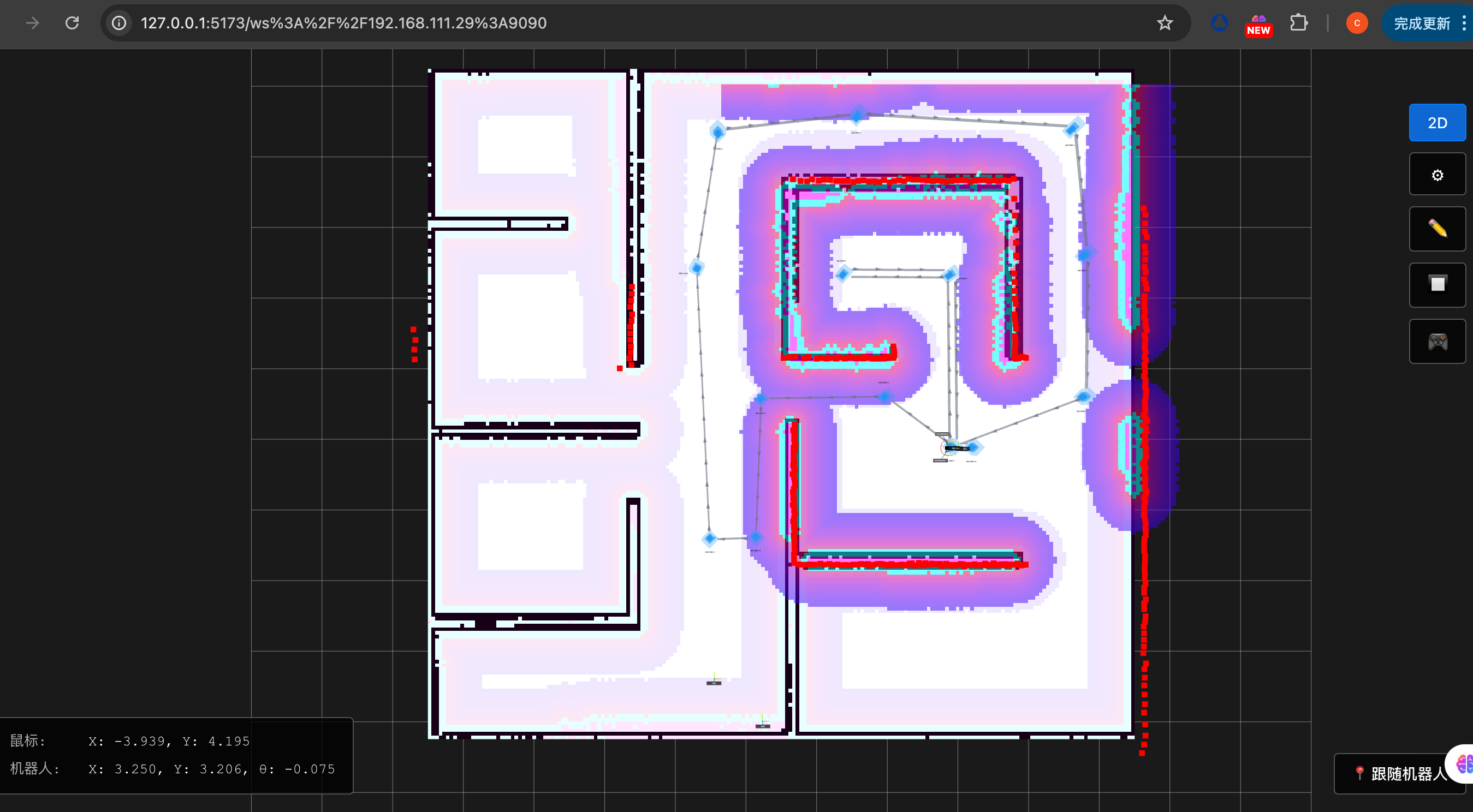
- 全局/局部地图显示 - 支持 OccupancyGrid 地图
- 机器人实时位置显示 - 基于 TF 变换
- 机器人速度仪表盘 - 实时显示线速度和角速度
- 机器人手动控制 - 支持速度控制
- 机器人重定位 - 支持 2D Pose Estimate
- 机器人单点/多点导航 - 支持导航目标点设置
- 机器人全局/局部规划轨迹显示 - 实时显示规划路径
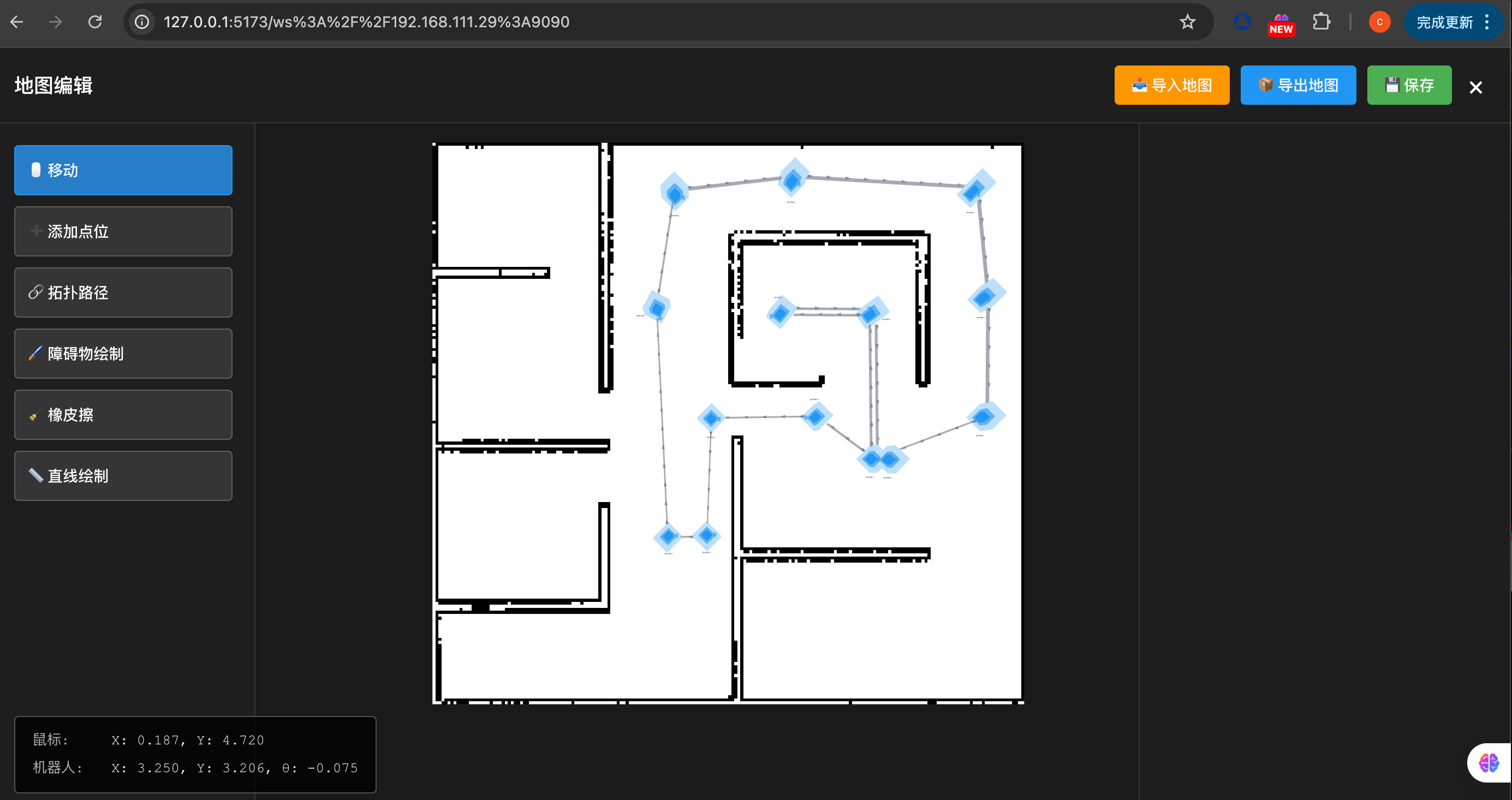
- 拓扑点位编辑功能 - 可视化编辑拓扑点
- 电池电量显示 - 订阅 BatteryState 话题
- 地图障碍物编辑功能 - 支持地图编辑
- 拓扑路径编辑功能 - 可视化编辑拓扑路径
- 地图加载/保存 - 支持地图文件管理
- 相机图像显示 - 支持多路图像显示
- 机器人车身轮廓显示 - 订阅 footprint 话题
- 激光雷达显示 - 支持 LaserScan 可视化



- 操作系统: Ubuntu 18.04+ / Windows 10+
- ROS 环境: ROS1 (Melodic/Noetic) 或 ROS2 (Foxy/Galactic/Humble)
- Qt5: Qt5.12+ (Qt5 Core, Widgets, SVG)
- CMake: 3.16+
- 编译器: GCC 7+ / MSVC 2019+
💡 提示: 点击下方标签切换查看不同平台的编译与使用说明
🐧 Linux 平台
sudo apt-get update
sudo apt-get install -y \
qtbase5-dev \
qtbase5-private-dev \
libqt5svg5-dev \
qtbase5-dev-tools \
libeigen3-dev \
libgtest-dev \
libsdl2-dev \
libsdl2-image-devUbuntu 20.04及以下的系统自带的CMake版本过低,需要升级到 3.16+ 版本。Ubuntu 22.04 及以上可跳过此步骤。
wget https://cmake.org/files/v3.16/cmake-3.16.4-Linux-x86_64.sh -O cmake-install.sh
chmod +x cmake-install.sh
sudo ./cmake-install.sh --prefix=/usr/local --skip-license# 克隆仓库
git clone https://github.com/chengyangkj/Ros_Qt5_Gui_App.git
cd Ros_Qt5_Gui_App# 创建构建目录
mkdir build && cd build
# 配置和编译
cmake ..
make -j$(nproc)./build.sh将拉取的三方库位置替换为 Gitee 镜像,加速编译:
./build_cn.sh或者手动指定镜像:
mkdir build && cd build
cmake .. \
-DCMAKE_BUILD_TYPE=Release \
-Ddockwidget_GIT_REPOSITORY=https://gitee.com/kqz2007/qt-advanced-docking-system_github.git \
-Dnlohmann_json_GIT_REPOSITORY=https://gitee.com/athtan/json.git \
-Dyaml-cpp_GIT_REPOSITORY=https://gitee.com/dragonet_220/yaml-cpp.git \
-Dwebsocketpp_GIT_REPOSITORY=https://gitee.com/open-source-software_1/websocketpp.git
make -j$(nproc)构建完成后,启动脚本会自动复制到 build 目录:
cd build
./start.sh启动脚本会自动设置库文件路径并启动程序。
cd build
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:./lib
./ros_qt5_gui_appcd build
make install
cd ../install/bin
./start.sh🪟 Windows 平台
Windows 平台推荐使用 vcpkg 管理依赖。项目已包含 vcpkg.json manifest 文件,可自动安装所有依赖。
使用 vcpkg 安装依赖:
- 安装 vcpkg(如果尚未安装):
git clone https://github.com/microsoft/vcpkg.git
cd vcpkg
.\bootstrap-vcpkg.bat- 设置环境变量(可选,推荐):
$env:VCPKG_ROOT = "C:\path\to\vcpkg"
[Environment]::SetEnvironmentVariable("VCPKG_ROOT", "C:\path\to\vcpkg", "User")- 安装项目依赖:
cd Ros_Qt5_Gui_App
vcpkg install --triplet x64-windows注意: 首次安装 Qt5 等大型依赖包需要较长时间(30-60分钟),因为需要从源码编译。后续构建会使用缓存,速度会快很多。
# 克隆仓库
git clone https://github.com/chengyangkj/Ros_Qt5_Gui_App.git
cd Ros_Qt5_Gui_App# 创建构建目录
mkdir build
cd build
# 配置 CMake(指定 vcpkg toolchain)
cmake .. `
-DCMAKE_TOOLCHAIN_FILE="$env:VCPKG_ROOT\scripts\buildsystems\vcpkg.cmake" `
-DCMAKE_BUILD_TYPE=Release `
-DBUILD_WITH_TEST=OFF
# 编译
cmake --build . --config Release --parallel
# 安装
cmake --install . --config Release将拉取的三方库位置替换为 Gitee 镜像,加速编译:
# 创建构建目录
mkdir build
cd build
# 配置 CMake,使用 Gitee 镜像加速
cmake .. `
-DCMAKE_TOOLCHAIN_FILE="$env:VCPKG_ROOT\scripts\buildsystems\vcpkg.cmake" `
-DCMAKE_BUILD_TYPE=Release `
-DBUILD_WITH_TEST=OFF `
-Ddockwidget_GIT_REPOSITORY=https://gitee.com/kqz2007/qt-advanced-docking-system_github.git `
-Dnlohmann_json_GIT_REPOSITORY=https://gitee.com/athtan/json.git `
-Dyaml-cpp_GIT_REPOSITORY=https://gitee.com/dragonet_220/yaml-cpp.git `
-Dwebsocketpp_GIT_REPOSITORY=https://gitee.com/open-source-software_1/websocketpp.git
# 编译
cmake --build . --config Release --parallel
# 安装
cmake --install . --config Release构建完成后,启动脚本会自动复制到 build 目录:
cd build
.\start.bat启动脚本会自动设置库文件路径并启动程序。
cd build
.\ros_qt5_gui_app.execd build
cmake --install . --config Release
cd ..\install\bin
.\start.bat下载release界面中对应系统版本的二进制压缩包:
- Linux: 下载
.tar.gz压缩包,解压后参考 Linux 方法 3: 安装后运行 运行程序 - Windows: 下载
.zip压缩包,解压后参考 Windows 方法 3: 安装后运行 运行程序
首次运行前,请确保:
- ROS 环境已配置: 确保已 source ROS 的 setup.bash/setup.bat
- 话题配置: 检查配置界面中的话题名称是否与你的 ROS 系统匹配
- 通道选择: 在配置界面中选择正确的通信通道(ROS1/ROS2/ROSBridge)
详细配置说明请参考 功能使用指南
Ros_Qt5_Gui_App/
├── src/ # 源代码目录
│ ├── core/ # 核心模块(主程序入口)
│ ├── mainwindow/ # 主窗口和界面
│ ├── common/ # 公共库
│ ├── basic/ # 基础数据结构
│ ├── channel/ # 通信通道(ROS1/ROS2/ROSBridge)
│ └── plugin/ # 插件系统
├── install/ # 安装脚本
│ ├── linux/bin/ # Linux 启动脚本
│ └── windows/bin/ # Windows 启动脚本
├── doc/ # 文档目录
├── cmake/ # CMake 模块
└── CMakeLists.txt # 主 CMake 配置文件
欢迎提交 Issues 和 Pull Requests!
如果有什么想法或者建议,欢迎提交 🌟心愿/需求单,说不定哪天就实现了呢!
- Fork 本仓库
- 创建特性分支 (
git checkout -b feature/AmazingFeature) - 提交更改 (
git commit -m 'Add some AmazingFeature') - 推送到分支 (
git push origin feature/AmazingFeature) - 开启 Pull Request

详情请访问 ROS_Flutter_Gui_App
支持地图编辑
详情请访问 ROS_Web_Gui_App
| 分支 | 支持平台 | 功能说明 |
|---|---|---|
| master | Win10 Ubuntu | ROS + QWidget + QGraphicsView 自定义可视化界面显示 |
| qml_hmi | Win10 Ubuntu | ROS + QML + C++ 混合编程,QML 自绘制地图、激光雷达等可视化 demo |
| simple | Win10 Ubuntu | ROS + QWidget + Librviz 可视化显示,CSDN 博客《ROS 人机交互软件开发》课程实现版本 |
| rviz_tree | Win10 Ubuntu | ROS + QWidget + Librviz 原生图层 API 管理图层,无需手动创建图层 |
| ros_qt_demo | Win10 Ubuntu | 使用 catkin_create_qt_pkg 创建的原始包,CMakeLists.txt 配置到 Qt5,可直接编译运行 |
| ros2_qt_demo | ROS2 | 运行在 ROS2 平台的 Qt demo 包,CMakeLists.txt 配置到 Qt5,可使用 colcon build 编译使用 |
| ROS2_Qt5_Gui_App | ROS2 | 与本仓库相同/不再维护 |
| Flutter App | 多平台 (Flutter) | 已实现 |
- QQ 群: 797497206
- Issues: GitHub Issues
本项目采用 MIT 开源协议。
感谢所有贡献者和使用者的支持!