
这是一个用于 Dex1_1 夹爪的 serial2dds 服务。
Dex1_1 是 Unitree 开发的夹爪,为具⾝智能应⽤⽽⽣。
graph LR
A(user) -- rt/dex1/right/cmd --> B(dex1_1, motor_id = 0)
B(dex1_1, motor_id = 0) -- rt/dex1/right/state --> A(user)
C(user) -- rt/dex1/left/cmd --> D(dex1_1, motor_id = 1)
D(dex1_1, motor_id = 1) -- rt/dex1/left/state --> C(user)
# 在用户开发计算单元 PC2(NVIDIA Jetson Orin NX 板)
sudo apt install libspdlog-dev libboost-all-dev libyaml-cpp-dev libfmt-dev
cd ~
git clone https://github.com/unitreerobotics/dex1_1_service
cd dex1_1_service
mkdir build && cd build
cmake ..
make -j6# 运行 `sudo ./dex1_1_gripper_server -h` 查看帮助详情。输出为:
# Unitree Dex1-1 Gripper Server:
# -h [ --help ] produce help message
# -v [ --version ] show version
# -n [ --network ] arg (=eth0) dds networkInterface
# -c [ --calibration ] calibrate the gripper motor
# 启动服务器
sudo ./dex1_1_gripper_server --network eth0
# 简化方式(默认参数)
sudo ./dex1_1_gripper_server
# 运行 `sudo ./test_dex1_1_gripper_server -h` 查看帮助详情。输出为:
# Unitree Dex1-1 Gripper Server Test:
# -h [ --help ] produce help message
# -v [ --version ] show version
# -n [ --network ] arg (=eth0) dds networkInterface
# -l [ --left ] test left dex1 gripper
# -r [ --right ] test right dex1 gripper
# 运行测试示例
sudo ./test_dex1_1_gripper_server --network eth0 -l -r
# 仅测试左侧或右侧夹爪
sudo ./test_dex1_1_gripper_server --network eth0 -l
# 或仅测试右侧夹爪
sudo ./test_dex1_1_gripper_server -r💡 注意:电机 ID 为 0 时,设定为右侧夹爪; ID 为 1 时,设定为左侧夹爪
闭合夹爪并运行以下命令进行电机标定。
sudo ./dex1_1_gripper_server -c以下是标定过程示例输出。
unitree@ubuntu:~/dex1_1_service/build$ sudo ./dex1_1_gripper_server -c
[2025-01-01 00:00:26.514] [info] Available Serial Ports: /dev/ttyUSB3, /dev/ttyUSB2, /dev/ttyUSB1, /dev/ttyUSB0
[2025-01-01 00:00:26.669] [info] Detected motors:
[2025-01-01 00:00:26.669] [info] - Motor ID: 0 Side: Right Port: /dev/ttyUSB2 cmdTopic: rt/dex1/right/cmd stateTopic: rt/dex1/right/state
[2025-01-01 00:00:26.669] [info] - Motor ID: 1 Side: Left Port: /dev/ttyUSB1 cmdTopic: rt/dex1/left/cmd stateTopic: rt/dex1/left/state
[2025-01-01 00:00:26.669] [info] ========== Motor Calibration (Motor 1 (index) of 2 (total)) ==========
[2025-01-01 00:00:26.669] [info] - Motor ID: 0, Side: Right, Port: /dev/ttyUSB2
[2025-01-01 00:00:26.669] [info] Please manually close the gripper tightly.
Then press 's' + Enter to calibrate, or any other key to skip.
>你需要像图中一样手动紧闭夹爪。
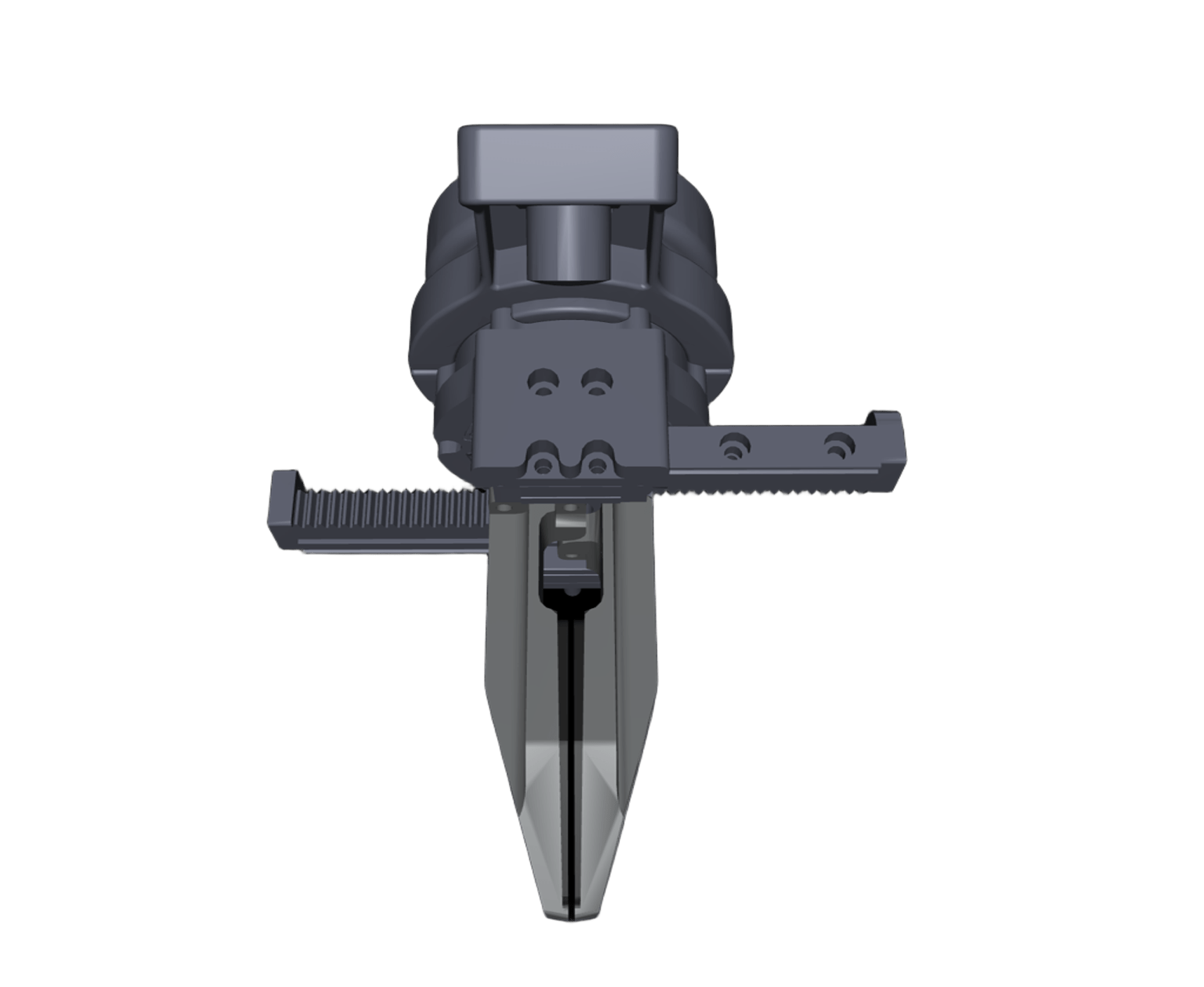
紧闭合后,按 s 键,然后 Enter。
> s
[2025-01-01 00:00:28.024] [info] Calibrating motor 0...
Motor type: MotorType::M4010
Id: 0
Calibration successful!
[2025-01-01 00:00:28.042] [info] Motor 0 calibration successful.
[2025-01-01 00:00:28.042] [info] ========== Motor Calibration (Motor 2 (index) of 2 (total)) ==========
[2025-01-01 00:00:28.042] [info] - Motor ID: 1, Side: Left, Port: /dev/ttyUSB1
[2025-01-01 00:00:28.042] [info] Please manually close the gripper tightly.
Then press 's' + Enter to calibrate, or any other key to skip.
>与上一步相同,继续标定第二个夹爪。
> s
[2025-01-01 00:00:28.881] [info] Calibrating motor 1...
Motor type: MotorType::M4010
Id: 1
Calibration successful!
[2025-01-01 00:00:28.903] [info] Motor 1 calibration successful.
[2025-01-01 00:00:28.903] [info] Calibration process completed.检查结果。
unitree@ubuntu:~/dex1_1_service/build$ sudo ./test_dex1_1_gripper_server -l -r
# 夹爪初始位置应接近零
[2025-01-01 00:00:13.776] [info] Right gripper init at q = 0.001
[2025-01-01 00:00:14.978] [info] Left gripper init at q = 0.000
R= 0.508 L= 0.502在完成上述设置和配置,并成功测试 dex1_1_gripper_server 后,你可以通过运行以下脚本,将 dex1_1_gripper_server 配置为系统启动时自动运行:
bash setup_autostart.sh按照脚本中的提示完成配置。
-
make -j6出错:unitree@ubuntu:~/dex1_1_service/build$ make -j6 Scanning dependencies of target dex1_1_gripper_server Scanning dependencies of target test_dex1_1_gripper_server [ 50%] Building CXX object CMakeFiles/test_dex1_1_gripper_server.dir/test/test_gripper.cpp.o [ 50%] Building CXX object CMakeFiles/dex1_1_gripper_server.dir/main.cpp.o /home/unitree/dex1_1_service/test/test_gripper.cpp:1:10: fatal error: unitree/idl/go2/MotorCmds_.hpp: No such file or directory 1 | #include <unitree/idl/go2/MotorCmds_.hpp> | ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ /home/unitree/dex1_1_service/main.cpp:1:10: fatal error: unitree/idl/go2/MotorCmds_.hpp: No such file or directory 1 | #include <unitree/idl/go2/MotorCmds_.hpp> | ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ compilation terminated. compilation terminated.
该错误说明 unitree_sdk2 头文件未找到。先编译并安装 unitree_sdk2:
cd ~ git clone https://github.com/unitreerobotics/unitree_sdk2 cd unitree_sdk2 mkdir build & cd build cmake .. sudo make install
-
sudo ./dex1_1_gripper_server出错:unitree@ubuntu:~/dex1_1_service/build$ sudo ./dex1_1_gripper_server [2025-08-14 09:56:53.595] [info] Available Serial Ports: /dev/ttyUSB3, /dev/ttyUSB2, /dev/ttyUSB1, /dev/ttyUSB0 [2025-08-14 09:56:54.339] [error] Motors not found after multiple attempts. # or unitree@ubuntu:~/dex1_1_service/build$ sudo ./dex1_1_gripper_server [2025-08-14 09:58:12.010] [info] Available Serial Ports: [2025-08-14 09:58:12.010] [warning] No ttyUSB serial ports found.
上述两种情况为:
- 夹爪电源未连接或线路接触不良。
- 夹爪串口板(连接到 G1 USB 口)未连接或线路接触不良。